












Mijn stageperiode heb ik doorgebracht bij Polymorf.
Tijdens mijn eerste ontmoeting met Marcel, één van de oprichters van Polymorf, hebben we het gehad over hoe ik het bedrijf en de huidige projecten kan versterken en wat zij mij als stagebedrijf te bieden hebben. Ik kon zien dat Marcel zich ook goed in mij had verdiept waarna hij diverse taken aanbood die erg binnen mijn interesses vallen en goed aansluiten bij de kant die ik op wil groeien. We hebben die dag veel afspraken gemaakt over mijn mogelijke taken en de delen waarbij ik zou worden betrokken gebaseerd op wat ik wil leren binnen deze stage.
Binnen Polymorf was Symbiosis op dat moment het grootste en belangrijkste project. Dit is een interactieve installatie die bestaat uit een VR wereld, geluid, geur, smaak en een nabootsing van het gevoel wat zich in de VR wereld afspeelt doormiddel van Soft-robotica. Tijdens deze stage heb ik de verantwoordelijkheid gekregen over de Soft-robotica afdeling en de 3D-printers. Ik werd al vrij snel los gelaten in de taken die ik had waarbij ik ook zelf moest onderzoeken waar heel Symbiosis over gaat en wat de voortgang was tot nu toe. Ik kreeg toegang tot alle bestanden waarna ik de studie van de soft robotica en diverse andere projectdelen kon voortzetten. Deze manier van werken gaf me een erg professioneel gevoel en leerde me veel over de gang van zaken binnen het bedrijf en de verantwoordelijkheid die ik op me nam. Ik was al snel zeer gemotiveerd.




















Soft Robotica
Er was nog weinig documentatie van de onderzoeken die er nu toe waren gedaan met de Soft-Robotica. Het proces kon ik aflezen door de voorheen gebruikte mallen, houders, en de Soft-Robotica die ik in de pakken vond te onderzoeken. Ik ben online veel eigen onderzoek gaan doen waarna ik al snel op nieuwe technieken en voorbeelden kwam. Ook kon ik veel van mijn eigen ideeën en technieken testen en maken met de materialen die we op de zaak hebben. Na veel experimenteren met verschillende luchtkamers en diktes van het siliconen rubber kon ik goed zien hoe het materiaal zich uitzette, hoe de vorm zich bewoog, wat er gebeurde met verschillende hoeveelheden luchtdruk en waar het materiaal het begaf.
Ik ben me na veel onderzoek naar het materiaal en de techniek gaan focussen op het Design van de Soft-Robotica. Door veel te blijven experimenteren met de luchtkamers die zich bevonden aan de binnenkant van de siliconen rubberen vormen kon ik de beweging en vorming sturen op een manier die de vorm visueel versterkte en op de juiste manier druk uitoefende op het lichaam.
Ik heb ook erg veel moeten experimenteren, ontwerpen en testen om de soft-robotica in verschillende vormen en materialen luchtdicht te maken. Dit was iets waar voor mij nog niet was gelukt en wat erg veel onderzoek nodig had naar de juiste technieken en materialen.
Ik heb bij het ontwerp voor het eerste personage veel inspiratie uit natuurlijke vormen zoals meteoren, koraal en zeesterren gehaald. Hierbij ben ik me gaan focussen op de beweging die deze wezens van zich lieten zien.
Deze bewegingen ben ik door middel van proefjes na gaan bootsen.
De studies hiernaar hebben me veel inzicht gegeven in de mogelijkheden van bewegingen door middel van soft-robotica. Het was een uitdaging die me veel uitkomsten heeft opgeleverd die ik later ook heb kunnen gebruiken voor de soft-robotica van andere personages.
Het onderzoek naar de beweging en de manier waarop ik dit tot stand kon brengen heeft me erg gefascineerd. Ik heb hier met plezier vele dagen studies naar gedaan.
Bij alle soft-robotica hebben Marcel, Pom en ik nagedacht over het lichaam wat zich bevind binnen de 3D ervaring en hoe wij ervoor konden zorgen dat de soft-robotica dit geplaatst vertaalde tot fysieke drukpunten op het lichaam. Hierbij moest er rekening worden gehouden met bijvoorbeeld de plaatsing van de spieren, het verloop van de energie en de houding die het lichaam aanneemt.
Bij dit deel was er een interessante samenwerking tussen verschillende afdelingen om gevoel zo realistisch er sterk mogelijk over te laten komen. De onderzoeken hiernaar gaven me veel nieuwe perspectieven en een goede motivatie om vaker bij de andere afdelingen te gaan kijken. Ik ben hierna ook erg veel gaan overleggen met andere afdelingen die direct en indirect een invloed hadden op de Soft-robotica waardoor het ontwerpen en overleggen steeds sterker en professioneler werd.
Tijdens al deze experimenten met verschillende studies, technieken, materialen en prototypes ben ik me erg gevarieerd gaan verdiepen. Dit heeft me veel geleerd over hoe ik het overzicht moet behouden over de richting die ik op wil met mijn ontwerp en met welke ontwerpfases ik rekening moet houden. Door te blijven experimenteren en reflecteren kreeg ik steeds meer controle over de uitkomst van zowel de vorm als de vervorming. Ik heb ook erg veel geleerd over het werken in teamverband door mijn afdeling te blijven koppelen en vergelijken met andere afdelingen van het project zodat het geheel zich sterk vormt tot één doorlopend werk.























Om de ontwerpen te kunnen realiseren ben ik erg veel in Blender gaan ontwerpen.
Bij het ontwerpen van de vormen voor de Soft Robotica moest ik veel modeleren in herhalende ronde vormen. Dit was een totaal nieuwe techniek voor mij waarvoor ik eerst veel tutorials heb moeten volgen. Ook moest ik me opnieuw verdiepen in andere technieken op het gebied van modeleren zodat ik niet belemmerd zou worden door mijn kennis bij het ontwerpen van nieuwe vormen voor de Soft-robotica. Om de vormen voor de Soft-Robotica te kunnen verwezenlijken moest ik de vorm in eerst in 3D modeleren en hier daarna mallen en houders voor maken.
De mallen moesten functioneel zijn voor het gieten waarbij ik moest denken aan hoe de mal op elkaar aansluit, hoe ik de overige luchtbellen uit de mal kan laten ontsnappen, hoe het teveel aan Siliconenrubber weg kan lopen, hoe deze mal makkelijk los te halen is en hoe deze mal aansluit op de houder. Om dit goed aan elkaar aan te laten sluiten moest ik nog veel leren. Al deze technieken vereiste ook kennis binnen het programma waardoor ik continu in een wisselwerking heb gezeten van bedenken, leren, ontwerpen en maken. Ook na het maken van iedere vorm moest ik deze testen en daar waar dit nodig is aanpassen.
Het combineren van een 3D programma met al de factoren die komen kijken bij het uitwerken van de Soft-Robotica heeft me erg veel nieuwe inzichten gegeven over de mogelijkheden van deze 3D programma’s. Ook moest ik blijven evalueren om niet alleen het ontwerp in de goede richting te krijgen, maar ook de tussentijdige stappen te begrijpen en me hierop voor te berijden wanneer ik ergens minder kennis over had.
Binnen Blender heb ik niet alleen erg veel Soft-robotica vormen en mallen gemaakt maar ook de modellen voor de geurcontainers, de bescherming en visuele aspecten van bijvoorbeeld de ruggengraad en aansluitingen en 3D-ontwerpen voor andere beschermingselementen zoals voor het MIDI apparatuur en de regeling van de luchtdruk.





















Een van mijn andere opgegeven taken binnen mijn stage bij Polymorf bestond uit het bijhouden van alles wat er geprint moest worden met de 3D-printers. Hierbij moest ik zorgen dat de printers continu aan stonden. Aangezien er nog geen duidelijk schema was waarin er voor mij te werk was gegaan begon ik met het maken van een lijst waarin ik verwerkte wat er geprint moest worden, wat er momenteel geprint werd, en wat er al geprint was. Hierdoor kon ik ook de volgorde baseren op welke print de hoogste prioriteit had en welke print op welk moment het functioneelst was om te printen wat betreft de tijd die het in beslag nam.
Via Internet heb ik geleerd hoe de 3D-printers te werk gingen.
Hierbij heb ik alle basis instructies geleerd om de 3D-printer goed af te stellen maar ook gevorderde instellingen om de prints beter, sneller en preciezer te maken. Ook heb ik geleerd hoe ik de printers repareer op erg veel verschillende manieren waardoor ik de gehele printer en werking van alle onderdelen ken.
Ik heb programma’s moeten leren zoals Ultimaker Cura zodat ik de 3D bestanden die ik maakte kon verwerken tot een bestand dat leesbaar was voor de 3D-printer. In deze programma’s kon ik veel instellen wat bepalend was over hoe de print er uit komt te zien. Tijdens het printen en het testen van de 3D-prints kwam ik er steeds meer achter hoe ik de instellingen zo effectief mogelijk kon gebruiken. Op het moment weet ik precies voor welk ontwerp ik welke instellingen nodig heb en wat de printer aankan.
De combinatie van het 3D-printen en programma's als Ultimaker Cura en Blender heeft me veel mogelijkheden laten zien en mijn denkveld als ontwerper verruimd.
Ik weet voortaan bij wat voor materialen en technieken het kan worden gebruikt en gecombineerd. Deze kennis geeft mij meer ruimte om me in te bewegen tijdens ontwerpfases en meer flexibiliteit tijdens het maken.
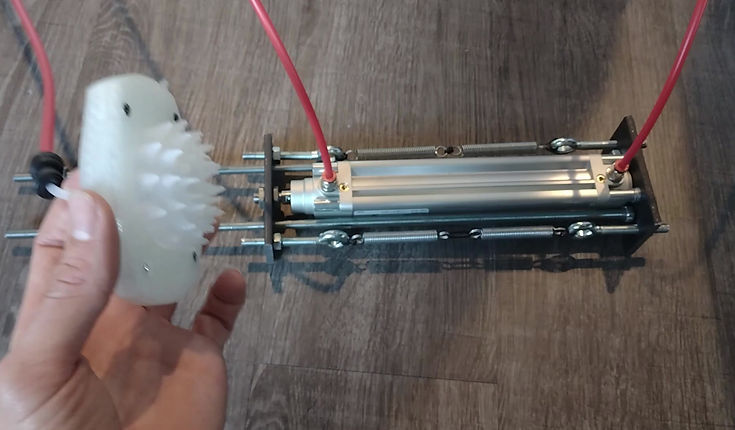
De soft-robotica bestaat uit 3D geprinte houders, een ventiel waar de lucht vanuit de buis doorheen gaat en een siliconen of rubberen vorm die de lucht opslaat. Het maken van deze luchtdichte siliconen vormen was erg veel werk. Tijdens het maken van de mallen hiervoor moest ik van alles te weten komen over de materialen en technieken. Ik heb veel materialen bij besteld om de vormen er heel en zonder luchtbellen uit te laten komen. Om erachter te komen welke materialen paste bij wat ik wilde heb ik onderzoek gedaan naar de verschillende technieken die er zijn, wat voor materialen hierbij gebruikt worden en hoe ze op elkaar reageren. Wanneer de mallen complexer werden waren er steeds nieuwe technieken nodig met daarbij passende materialen. De productie van deze siliconen vormen was iets waar ik me iedere dag mee bezig heb gehouden. De diversiteit en de complexiteit van de soft robotica zorgde ervoor dat er overal een andere uitwerking nodig was voor een functionerende uitkomst. Hierbij moesten ik continu nieuwe ontwerpen maken die paste bij de vorm en op zichzelf luchtdicht waren.
Toen ik mijn stage hier begon waren er nog geen luchtdichte technieken gevonden voor het maken van de soft-robotica. Ik kan met trots zeggen dat ik nu allerlei verschillende modellen, luchtdicht heb weten te ontwerpen en maken.
De complexiteit in vorm en techniek zijn erg toegenomen waardoor er bij de huidige ontwerpen veel meer mogelijk is.
Dit heeft de afdeling van soft-robotica op meer onderdelen inzetbaar gemaakt.
Ook ben ik bij de baas met een nieuw voorstel aangekomen met een uitgewerkt plan-van-aanpak en onderzochte technieken en materialen voor soft-robotica op de vloerdelen. Dit is met veel lof en enthousiasme goedgekeurd.
Ik mag hieraan verder werken na mijn stage.


De werkruimte na
mijn vernieuwde en
functionelere inrichting.
Tijdens al mijn taken heb ik ook erg veel andere geholpen. Zo heb ik allerlei 3D-prints ontworpen om onderdelen te maken voor mijn collega’s zoals behuizingen waarbij ik, voor de technische kant die de luchtdruk regelt, een rails en beschermingen voor hun materialen heb ontworpen en gemaakt.
Ook heb ik de geurcontainers geprint en met nieuwe niet lekkende technieken klaar voor gebruik gemaakt. Nadat we een nieuwe techniek hadden gevonden waren hier ook nieuwe modellen voor nodig die ik in Blender heb mogen ontwerpen. Er kwam veel techniek en meetwerk bij kijken wat voor een uitdaging heeft gezorgd bij het modeleren. Op deze manier heb ik wel goed in schaal leren werken binnen blender door de 3D bestanden precies aan te laten sluiten op tot de millimeter gemeten fysieke objecten.
Samen met Marcel heb ik me nog bezig gehouden met veel andere taken die moesten worden gedaan. Ik ben zelfs een dag bij de maker van de pakken gaan helpen om van alles te leren en door te kunnen zetten binnen Polymorf. De kennis hierover heeft een belangrijke rol gespeeld bij het voorbereiden en werken binnen de expositie.
Ik vond het heel fijn om mijn collega’s te kunnen helpen. Ik heb hierdoor veel inzicht opgedaan over hoe de samenwerking binnen een bedrijf als Polymorf tot zijn werk gaat.
Bij de verschillende afdelingen die samen Symbiosis vormen heb ik mee kunnen kijken naar de ontwerpfases, het proces hiervan en hoe het uiteindelijk één geheel vormt. Ik heb bij erg veel onderdelen binnen het project mee mogen denken wat ervoor zorgde dat ik de verschillende ontwerprichtingen leerde te begrijpen om zo ook beter mijn deel toe te kunnen passen.


Bij de expositie van SYMBIOSIS tijdens IDFA in het Eye museum werden wij als stagiaires gevraagd om te komen helpen. Wij hebben tijdens de expositie de volledige installatie gaande gehouden. Shea, een ingehuurde hulpkracht uit Amerika, werkte als host en verwelkomde de gasten waarna hij ze naar binnen begeleidde en uitleg gaf over de installatie.
Wanneer de gasten hun keuze hadden gemaakt voor welk karakter ze wilde beleven vingen wij ze op. We begonnen het gesprek professioneel door ze te introduceren aan de pakken. We vertelde ze over hoe ze de ruimte konden benutten binnen de ervaring en hoe wij ze zouden begeleiden mocht er een gevaarlijke situatie voortkomen. Ook gaven we aan dat er tijdens de ervaring naar ze wordt geluisterd mocht er iets oncomfortabel zijn zodat ze zich veilig voelde.
Nadat we de gasten in de pakken hadden gehesen begeleidde we ze naar de ruimte waarna we de ervaring startte. Tijdens de ervaring begeleidde we de bezoekers wanneer dit nodig was en zorgde we ervoor dat ze niets merkte van de bekabeling waar ze aan vast zaten. Ook zorgde we voor het voedsel wat ze tijdens de ervaring toegereikt kregen. Achteraf maakte we de pakken grondig schoon voor de volgende ronde. Hier hadden we vaak nog tijd om de gasten te spreken over hoe ze de ervaring hadden beleefd.
De gehele expositie heeft me erg veel geleerd. Dit is de eerste keer dat ik zoiets vanuit achter de schermen beleef. Ik heb me erg professioneel opgesteld gedurende de gehele expositie waarna ik veel inzichten heb opgedaan over hoe ik me moet verhouden tegenover gasten bij een installatie als deze. Ik merkte dat ik steeds professioneler begon te spreken en dat ik alsmaar beter wist hoe ik de gasten moest introduceren aan de situaties die zich zouden plaatsvinden binnen de installatie. Ik merkte goed op wanneer iemand zich oncomfortabel voelde waarna ik te hulp schoot en dit erg gewaardeerd werd.
Na iedere ronde spraken we de gasten over hun ervaring met de installatie. De gesprekken die we met ze hadden waren erg verruimend. We kregen door de verschillende meningen een beter beeld over de mogelijke verbeterpunten van de ervaring. Naast dit waren er ook veel belangrijke en gespecialiseerde gasten die zich bezighouden met VR ervaringen of soft-robotica. Het was erg vererend dat sommige gasten me vertelde dat ze naar de ervaring waren gekomen omdat ze hadden gezien dat we met soft-robotica werken op een voor hun nieuwe manier.
Ik had zelfs een keer een gesprek met iemand die de soft-robotica ontwerpt voor chirurgie waarna ik hem vertelde dat ik mede die richting heb gebruikt voor mijn onderzoek naar de soft-robotica. We hebben nog een erg interessant gesprek gehad waar ik veel van leerde en waar erg lovende woorden uitkwamen over het gebruik van de soft-robotica in onze installatie.
Mijn afdeling wat betreft de soft-robotica werkte erg goed tijdens de installatie. Soms moesten er delen worden vervangen omdat er iets mis ging tussen de combinatie van het pak, de soft-robotica en de hoeveelheid luchtdruk die erop komt. Dit kon ik echter snel vervangen omdat ik me goed had voorbereid met een reserve voorraad. Ondanks dat de expositie de eerste keer was dat alles bij elkaar kwam en werd getest verliep de gehele installatie erg soepel. Daar waar aanpassingen moesten worden gemaakt gebeurde dit soepel tussen de dagen door waarna de installatie opnieuw kon schitteren.
Ik kreeg regelmatig erg positieve feedback over mij soft-robotica van de gasten die de installatie hadden beleefd. Dit deed me erg goed en gaf me een voldaan gevoel over het werk wat ik de afgelopen periode heb verricht.
We werkte erg lange dagen wat zeer vermoeiend was. Dit haalde echter niet de ervaring naar beneden aangezien we een geweldig team hadden gevormd wat elkaar iedere dag opnieuw motiveerde om het beste uit de dag te halen. Al heb ik sommige mensen maar 2 weken leren kennen. De tijd die we hadden en de band die we opbouwde was geweldig. Ik ga ze erg missen.
We hebben met onze installatie SYMBIOSIS ook nog een grote prijs weten te scoren binnen IDFA.
De prijs voor creatiefste technologie. Dit was een erg vererende titel die we met trots mee naar huis mochten nemen.
Het was een erg fijn team om mee samen te werken en ik heb erg van mijn tijd hier genoten. Het onderzoek en de route die ik beging was erg leerzaam en gevarieerd. Ik kreeg leuke opdrachten van Marcel waarbij ik ook erg veel de ruimte kreeg om zelf na kan denken over wat mij de ideale uitkomst leek voor mijn afdeling binnen dit project. Ik heb geleerd al mijn stappen goed te blijven bespreken waardoor er een goed zicht is op mijn proces. Op deze manier kon er worden beslist welke keuzes werkte binnen het project en met welke ideeën ik door kon in een nieuwe richting.
Tijdens de zoektocht heb ik heel veel geleerd over de verschillende aspecten die voorkomen bij het maken van de soft robotica en andere projecten maar vooral over de manier waarop ik hier mijn eigen onderzoek naar kan doen.
Ik ben veel zelfstandig te werk gegaan maar heb tegelijkertijd erg goed leren werken in teamverband.
Ook het combineren van alle verschillende taken binnen het project heeft me erg veel geleerd. Ik vind het fijn om mee te kunnen kijken bij de andere om zo te zien hoe dit project zich vanuit allerlei verschillende werkzaamheden toch samen vormt tot een groot kloppend geheel.
Ik heb deze stageperiode zoveel verschillende dingen mogen doen met zoveel verschillende deadlines dat ik iets heb geleerd wat me tot nu toe nog amper was gelukt. Ik heb leren plannen. Sinds de eerste week ben ik alles wat er moest gebeuren bij gaan houden in een planning. Hierbij heb ik categorieën gemaakt voor de verschillende werkzaamheden en afdelingen. Ik heb inventarisaties bijgehouden zodat we ten alle tijden wisten hoever we waren en waar de prioriteit lag wat betreft de productie en vordering van de projecten.
Deze planning heeft zich tijdens de voortgang steeds meer gevormd tot een overzichtelijke lijst waar ik precies kon vinden wat ik nodig had. Zelfs de tijden had ik in sommige gevallen tot de minuut uitgerekend om zo productief mogelijk te werk te kunnen gaan.
Ik heb deze stage erg goed geleerd hoe een planning voor structuur en duidelijkheid kan zorgen op een manier die bij mij past. Voorheen vond ik dit altijd erg moeilijk maar dankzei de gevarieerde taken en verschillende door elkaar lopende projecten, waar de prioriteit steeds veranderde gebaseerd op de voortgang van andere richtingen van het project, werd het mij opeens duidelijk waar deze planningen voor diende. Ik snapte hoe een planning werkte maar niet waar ik het voor mij nuttig toe moest passen. Dit is iets wat me erg veel perspectief heeft gegeven voor toekomstige projecten.
Mijn tijd bij polymorf heeft erg veel van me gevraagd maar ook erg veel gegeven.
Ik heb het erg druk gehad en misschien zelfs wel te druk aangezien ik me vooral focuste op de deadlines en situaties binnen Polymorf en amper tijd had om me te richten op mijn studie. Ik had erg veel gedocumenteerd en gereflecteerd op wat er gebeurde maar vooral op een manier die paste binnen Polymorf. Op het begin dacht ik dat ik amper reflecteerde voor school omdat ik weinig schriftelijk vastlegde. Maar ik heb gemerkt dat de manier waarop ik continu reflecteerde en reageerde op wat ik deed en wat het met me deed juist erg goed was. Ik uitte me direct binnen het bedrijf op een erg professionele manier. Ik heb belangrijke gesprekken gehouden binnen het bedrijf over mijn visie. Ik heb geen moment getwijfeld om mijn mening bij grote keuzes op tafel te gooien. Wanneer ik het ergens niet mee eens was heb ik dit laten horen in een professioneel gesprek wat ervoor zorgde dat we ook in stressvolle situaties elkaar konden begrijpen. Ik heb continu mijn grenzen aangegeven. Ik heb aan kunnen geven hoe ik vanuit mijn kant aankijk tegen situaties om zo aan te kunnen geven welke delen mijn prioriteit hadden. Dit alles heb ik erg kalm kunnen bespreken omdat ik niks op liet lopen. Ik bleef reflecteren op wat er gebeurde binnen de stage en hoe ik me erbij voelde en maakte hier gelijk werk van door het bespreekbaar te maken.
Dit zorgde ervoor dat mijn ervaring bij deze stage erg prettig is verlopen.
Ik voel me erg op mijn plek binnen dit team.
Er is mij gevraagd om na de stage terug te komen bij het bedrijf, om onder betaling verder te werken aan het project SYMBIOSIS.
Ik vat dit op als een erg groot compliment en kijk ernaar uit deze taak voort te zetten.
Ik ben sinds ik op het Sint-Joost zit erg geïnteresseerd geraakt in zintuigelijke ervaringen. Met mijn projecten ben ik hier ook steeds meer mee bezig. Mijn concepten bevinden zich vaak in maatschappelijke gebied waarbij ik speel met ethische vraagstukken. Ik daag de bezoeker graag uit door het gedrag te sturen of door de bezoeker met gedrag te laten antwoorden.
Mijn stage bij Polymorf was de perfecte plek om hier meer over te leren. De ervaring van Symbiosis speelde uitgebreid met erg veel zintuigen. Door overal achter de schermen mee te kunnen kijken en hiermee ook mijn eigen afdeling te combineren, heb ik erg veel inzicht gekregen over de delen die hierbij een grote rol spelen. Ik heb gezien wat cruciaal is voor de communicatie tussen de zintuigen zelf.
Tijdens het helpen bij de expositie van Symbiosis bij IDFA mocht ik zelf ervaren wat het met de deelnemers en mijzelf deed.
De gesprekken die ik daar had waren erg interessant en zaten bomvol goede tips. Het was zo verrijkend dat ik deze manier van contact zoeken met de deelnemer zeker mee ga nemen in mijn eigen projecten. Ik merk dat ik het erg belangrijk vind om dicht bij de bezoeker te staan om veel mee te kunnen maken van hun beleving. Zo krijg ik een goede reflectie op wat ik doe en waar de verbeterpunten liggen.
Waar ik voorheen toch meer stuurde merk ik dat ik het ook erg fijn vind om me mee te laten slepen door de verassing van de verschillende reacties.
De manier van werken bij Polymorf was voor mij op het begin erg wennen. Voorheen had ik bij mijn andere stages meer een volgende rol waarin we op sommige momenten los gelaten werden als test. Bij deze stage kreeg ik al vanaf het begin alle verantwoordelijkheid over mijn eigen afdeling. Waar dit op het begin schrikken was voelde ik me hier al erg snel op mijn gemak. Het zorgde ervoor dat ik de dingen anders ging benaderen. Ik had meer motivatie om echt goed te presteren omdat ieder zijn werkproces een invloed had op elkaar. Ik was dan ook verantwoordelijk over een belangrijk deel uit de ervaring. Mijn keuzes en vorderingen moest ik blijven overleggen zodat mijn werk en alle stappen hiervan functioneel en passend binnen het geheel bleven.
Doordat ik mijn eigen afdeling had, merkte ik dat het steeds belangrijker voor me werd om zelf de communicatie op te zoeken met andere afdelingen binnen het zelfde project.
Hierdoor heb ik meer inzicht gekregen in hoe de communicatie hiertussen zo sterk mogelijk kan verlopen en hoeveel dit wel niet toevoegt. Ik vind het erg fijn werken op deze manier. Ik weet van mezelf dat ik graag veel zeggenschap heb over mijn eigen werk. Maar waar ik ook erg van kan genieten is samenwerking en de hoeveelheid creativiteit en inspanning dit wel niet te weeg brengt. Op deze manier heb ik controle en kan ik toch meewerken aan een groter gezamenlijk project. Ook het werken onder een baas vind ik erg fijn. Het zorgt ervoor dat ik zelf minder stress ervaar en het is fijn om mijn stappen na mijn eigen reflecties nog te kunnen bespreken. Ook doet het me goed en geeft dit me erg veel motivatie en plezier tijdens het werken om mensen te kunnen helpen.
Nu ik bij Polymorf werk zit ik samen in de afdeling Soft-robotica met Pom. De samenwerking tussen ons gaat soepel en vlekkeloos. We maken erg snelle stappen en krijgen heel veel ruimte om onze creativiteit te uiten. Ik merk dat ik een baan als deze wel zie zitten voor de toekomst. Ik weet nog niet perse of dat bij Polymorf zal zijn aangezien ze hier meer te werk gaan met freelancers en ik me toch ook wil focussen op een positie binnen een bedrijf. Wel vindt ik het heerlijk om me te blijven verdiepen in nieuwe onderwerpen en technieken.
Doordat er bij de projecten van Polymorf altijd erg gevarieerde onderzoeken en werkzaamheden zijn, kwam mijn gevarieerde kennis over materialen en technieken goed van pas en kon ik deze uitbreiden met extra informatie en nieuwe vaardigheden.
Als ik mijn ontwerphouding op het moment samen vat ben ik vooral bezig met het opzoeken van confrontaties en bewustzijn doormiddel van zintuigelijke installaties en ervaringen. Maatschappelijke en ethische kwesties wil ik laten inzien en onderzoeken door de bezoeker zelf.
Tijdens mijn stage heb ik al deze elementen toe kunnen passen en kunnen ontwikkelen.































